オイラー角による回転行列の表現

3つの角度 $\phi$、$\theta$、$\psi$ をオイラー角と呼ぶ。
解説
座標系 $C$ をデカルト座標系とし、 それぞれの座標軸を $x,y,z$ と表す。 また、 それぞれの座標軸を向いた単位ベクトルを $\{ \mathbf{e}_{x}, \mathbf{e}_{y},\mathbf{e}_{z} \}$ とすると、 これらは正規直交基底を成す。ある物体の位置 $\mathbf{r}$ が座標系 $C$ の正規直交基底 によって、 以下のように表されている。

$(1)$ $z$ 軸回転:
物体を座標系 $C$ の $z$ 軸まわりに角度 $\phi$ だけ回転させる。
このとき、
物体だけでなく座標系 $C$ も同様に回転させ、
新しい座標系 $C'$ を定義する。
よって、 回転後の座標系 $C'$ は座標系 $C$ を $z$ 軸まわりに角度 $\phi$ だけ回転させて得られる座標系であり、 座標軸を $x'$, $y'$, $z'$ と表すことにする (下図)。
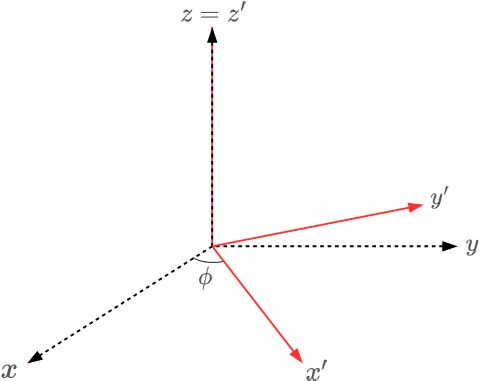
座標系 $C$ (点線) と $C'$ (オレンジ)
$C'$ のそれぞれの座標軸を向く単位ベクトルを $\{ \mathbf{e}_{x}', \mathbf{e}_{y}', \mathbf{e}_{z}' \}$ とすると、
これらは正規直交基底を成す。
物体と座標系が同様に回転するので、 回転後における座標系 $C'$ と 位置 $\mathbf{r}'$ の間の相対位置関係は、 回転前における座標系 $C$ と 位置 $\mathbf{r}$ の間の相対位置関係と変わらない(下図)。 従って、 回転後の物体の位置 $\mathbf{r}'$ を座標系 $C'$ によって表すと、 回転前の物体の位置 $\mathbf{r}$ を座標系 $C$ で表したとき(上の式)と同じ座標値を持つ。 すなわち、 $\mathbf{r}'$ は

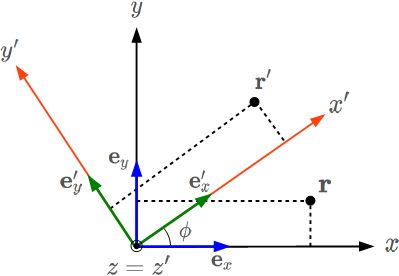
$z$ 軸の真上から見た図。
回転後の座標系 $C'$ と位置 $\mathbf{r}'$ の間の相対位置関係は、
回転前の座標系 $C$ と位置 $\mathbf{r}$ の間の相対位置関係と変わらない。
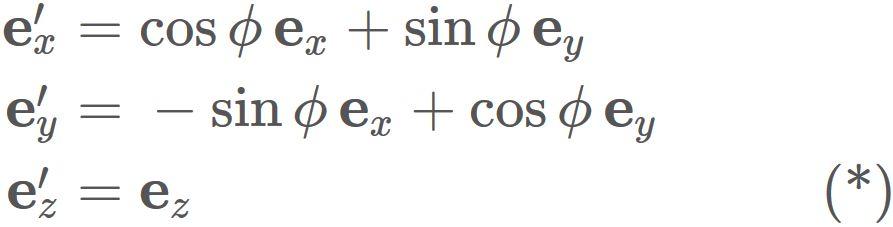
また、
回転後の正規直交基底 $\{ \mathbf{e}_{x}', \mathbf{e}_{y}', \mathbf{e}_{z}' \}$ は、
回転前の正規直交基底 $\{ \mathbf{e}_{x}, \mathbf{e}_{y}, \mathbf{e}_{z} \}$ によって、
$(2)$ $y$ 軸回転:
物体を座標系 $C'$ の $y'$ 軸まわりに角度 $\theta$ だけ回転させる。
このとき、
物体だけでなく座標系 $C'$ も同様に回転させ、
新しい座標系 $C''$ を定義する。
よって、 回転後の座標系 $C''$ は座標系 $C'$ を $y$ 軸まわりに角度 $\theta$ だけ回転させて得られる座標系であり、 座標軸を $x''$, $y''$, $z''$ と表すことにする (下図)。
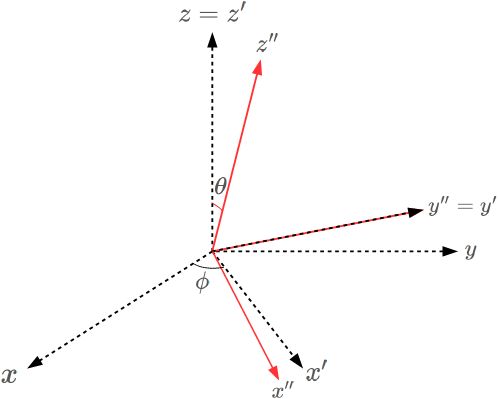
座標系 $C$ と $C'$ (点線) と $C''$ (オレンジ)
$C''$ のそれぞれの座標軸を向く単位ベクトルを $\{ \mathbf{e}_{x}'', \mathbf{e}_{y}'', \mathbf{e}_{z}'' \}$ とすると、
これらは正規直交基底を成す。
物体と座標系が同様に回転するので、 回転後における座標系 $C''$ と 位置 $\mathbf{r}''$ の間の相対位置関係は、 回転前における座標系 $C'$ と 位置 $\mathbf{r}'$ の間の相対位置関係と変わらない(下図)。 従って、 回転後の物体の位置 $\mathbf{r}''$ を座標系 $C''$ によって表すと、 回転前の物体の位置 $\mathbf{r}'$ を座標系 $C'$ で表したとき(上の式)と同じ座標値を持つ。 すなわち、 $\mathbf{r}''$ は

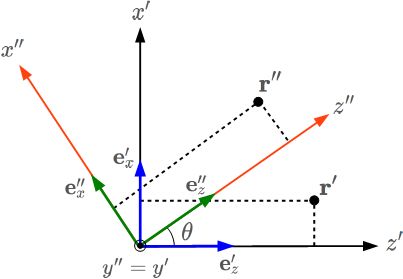
$y'$ 軸の真上から見た図。
回転後の座標系 $C''$ と位置 $\mathbf{r}''$ の間の相対位置関係は、
回転前の座標系 $C'$ と位置 $\mathbf{r}'$ の間の相対位置関係と変わらない。
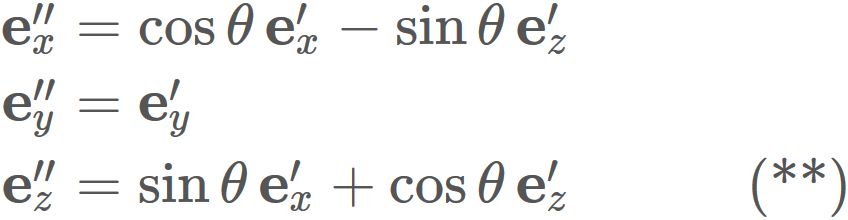
また、回転後の正規直交基底 $\{ \mathbf{e}_{x}'', \mathbf{e}_{y}'', \mathbf{e}_{z}'' \}$ は、
回転前の正規直交基底 $\{ \mathbf{e}_{x}', \mathbf{e}_{y}', \mathbf{e}_{z}' \}$ によって、
$(3)$ $z$ 軸回転:
最後に物体を座標系 $C''$ の $z''$ 軸まわりに角度 $\psi$ だけ回転させる。
このとき、
物体だけでなく座標系 $C''$ も同様に回転させ、
新しい座標系 $C'''$ を定義する。
よって、 回転後の座標系 $C'''$ は座標系 $C''$ を $z$ 軸まわりに角度 $\psi$ だけ回転させて得られる座標系であり、 座標軸を $x'''$, $y'''$, $z'''$ と表すことにする (下図)。
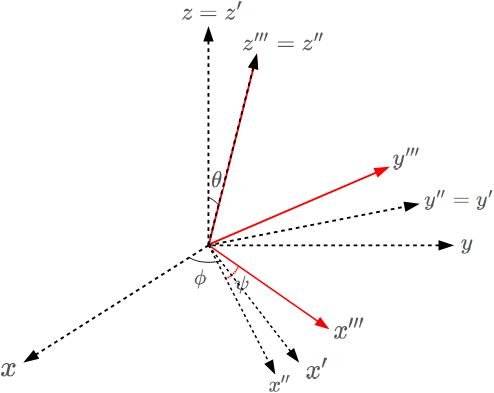
座標系 $C$ と $C'$ と $C''$ (点線) と $C'''$ (オレンジ)
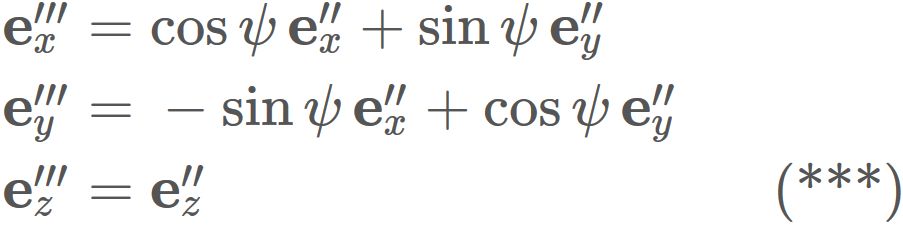
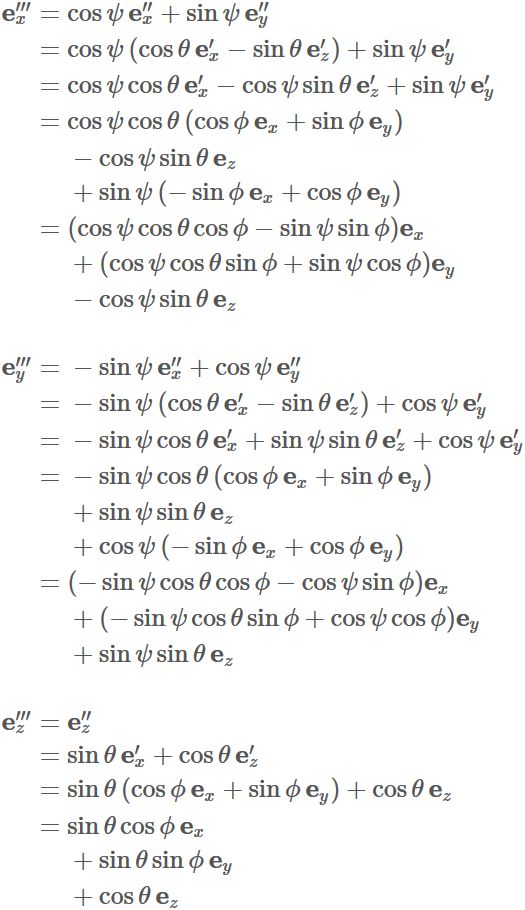
$C'''$ のそれぞれの座標軸を向く単位ベクトルを $\{ \mathbf{e}_{x}''', \mathbf{e}_{y}''', \mathbf{e}_{z}''' \}$ とすると、
これらは正規直交基底を成す。
回転後の物体の位置を $\mathbf{r}'''$ とし、
回転後の座標系 $C'''$ の正規直交基底を $\{ \mathbf{e}_{x}''', \mathbf{e}_{y}''', \mathbf{e}_{z}''' \}$ と表す。
物体と座標系が同様に回転するので、 回転後における座標系 $C'''$ と 位置 $\mathbf{r}'''$ の間の相対位置関係は、 回転前における座標系 $C''$ と 位置 $\mathbf{r}''$ の間の相対位置関係と変わらない(下図)。 従って、 回転後の物体の位置 $\mathbf{r}'''$ を座標系 $C'''$ によって表すと、 回転前の物体の位置 $\mathbf{r}''$ を座標系 $C''$ で表したとき(上の式)と同じ座標値を持つ。 すなわち、 $\mathbf{r}''$ は

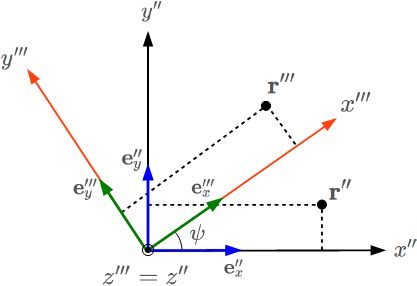
$y'$ 軸の真上から見た図。
回転後の座標系 $C''$ と位置 $\mathbf{r}''$ の間の相対位置関係は、
回転前の座標系 $C'$ と位置 $\mathbf{r}'$ の間の相対位置関係と変わらない。
また、回転後の正規直交基底 $\{ \mathbf{e}_{x}'', \mathbf{e}_{y}'', \mathbf{e}_{z}'' \}$ は、
回転前の正規直交基底 $\{ \mathbf{e}_{x}', \mathbf{e}_{y}', \mathbf{e}_{z}' \}$ によって、
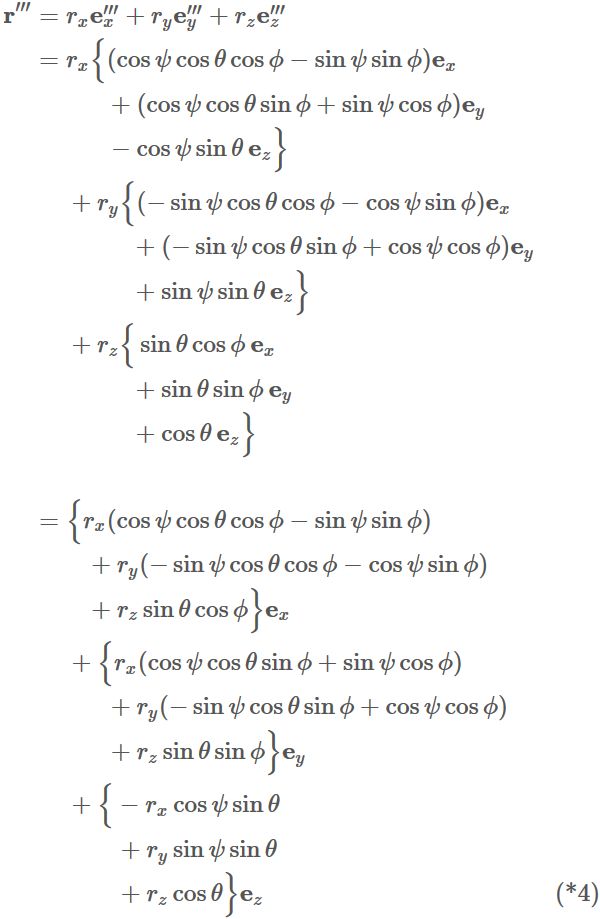
ここで3つの回転後の物体の位置 $\mathbf{r}'''$ を

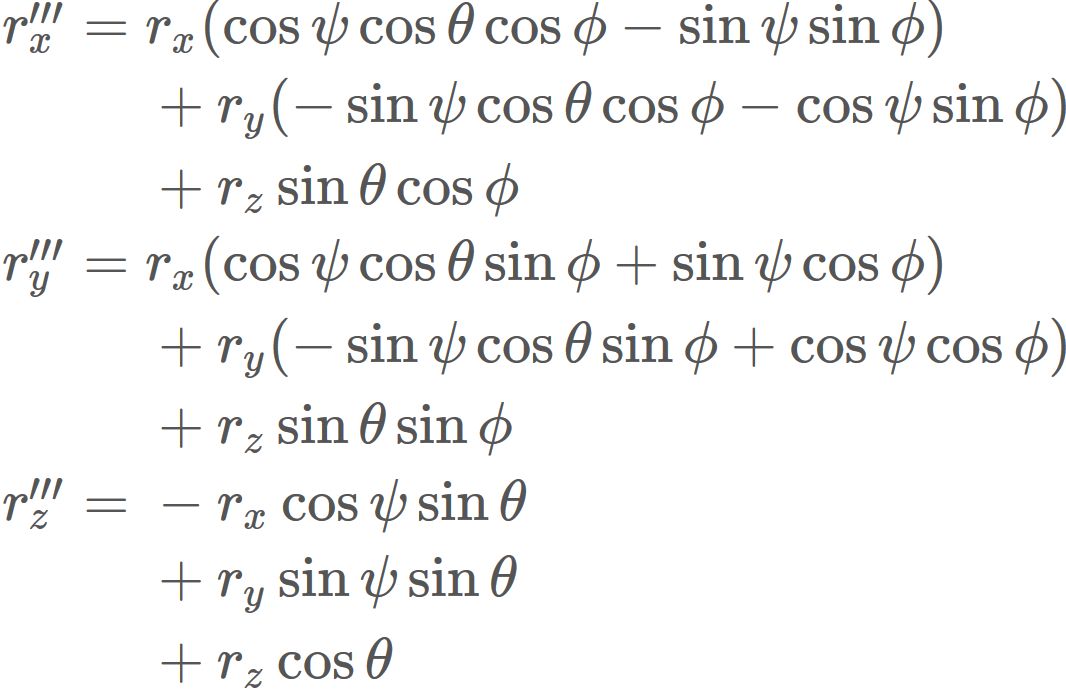

$ r_{x}''',r_{y}''',r_{z}''' $ は、3 つの回転後の物体の位置であり、 一方、 $ r_{x},r_{y},r_{z} $ は物体の初期位置を座標値である。 従って、上の変換式は、 3 つの回転後の物体の位置が初期位置に対して回転行列
3つの回転角 $\phi,\theta,\psi$ をオイラー角という。