ロールピッチヨー角による回転行列の表現

ここで、 $z$ 軸回転の回転角度 $\gamma$ をヨー角、 $y$ 軸回転の回転角度 $\beta$ をピッチ角、 $x$ 軸回転の回転角度 $\alpha$ をロール角、と呼ぶ。
証明
ある物体の位置 $\mathbf{r}$ が、 座標系 $C$ の正規直交基底 $\{ \mathbf{e}_{x}, \mathbf{e}_{y},\mathbf{e}_{z} \}$ によって、 以下のように表されている。
$(1)$ $z$ 軸回転:
物体を座標系 $C$ の $z$ 軸のまわりに角度 $\gamma$ だけ回転させる。
このとき、座標系 $C$ も物体とともに回転させ、
回転後の新しい座標系を $C'$ とする。
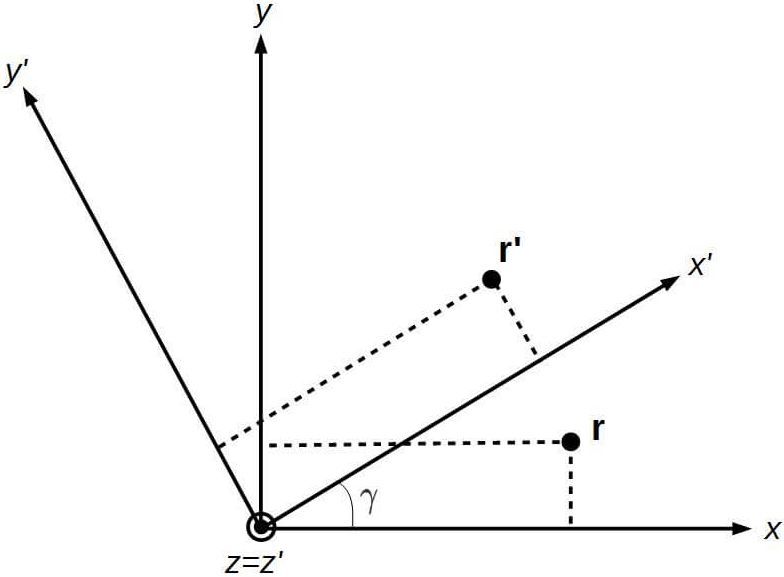
上の図は、
物体が $z$ 軸まわりに角度 $\gamma$ だけ回転するときに、
座標系も物体に追随して $z$ 軸まわりに角度 $\gamma$ だけ回転する様子を表したものである。
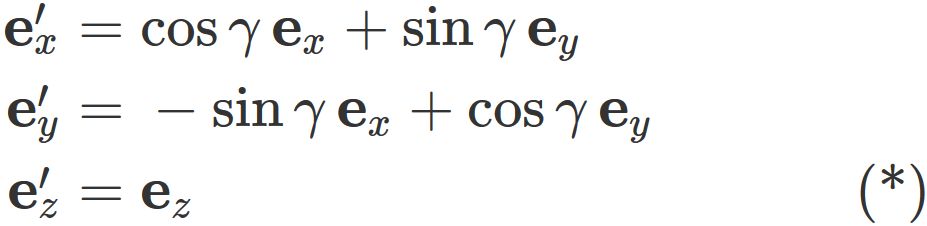
回転後の物体の位置を $\mathbf{r}'$ とし、 回転後の座標系 $C'$ の正規直交基底を $\{ \mathbf{e}_{x}', \mathbf{e}_{y}', \mathbf{e}_{z}' \}$ とする。 回転前と回転後で物体と座標系との相対的位置関係が変わらないことから、 $\mathbf{r}'$ の位置を $C'$ によって表すと、 $\mathbf{r}$ と同じ座標値を持つ。 すなわち、 $\mathbf{r}'$ は

$(2)$ $y$ 軸回転:
次に物体を座標系 $C'$ の $y'$ 軸のまわりに角度 $\beta$ だけ回転させる。
このとき、
座標系 $C'$ も物体とともに回転させる。
回転後の新しい座標系を $C''$ とする。
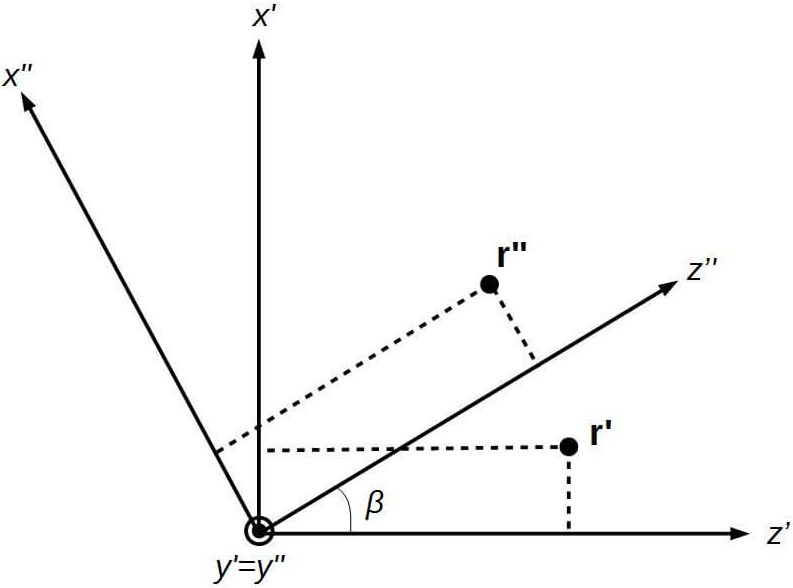
上の図は、
物体が $y'$ 軸まわりに角度 $\beta$ だけ回転するときに、
座標系も物体に追随して $y'$ 軸まわりに角度 $\beta$ だけ回転する様子を表したものである。
回転後の物体の位置を $\mathbf{r}''$ とし、
回転後の座標系 $C''$ の正規直交基底を $\{ \mathbf{e}_{x}'', \mathbf{e}_{y}'', \mathbf{e}_{z}'' \}$ とする。
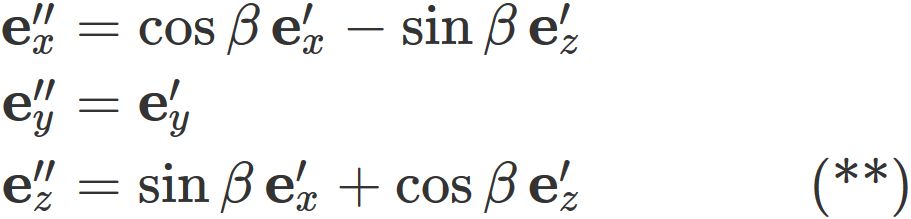
回転前と回転後で物体と座標系との相対的位置関係が変わらないことから、
$\mathbf{r}''$ の位置を $C''$ によって表すと、$\mathbf{r}$ と(または $\mathbf{r}'$ と) 同じ座標値を持つ。
すなわち、$\mathbf{r}''$ は

$(3)$ $x$ 軸回転:
最後に物体を座標系 $C''$ の $x''$ 軸のまわりに角度 $\alpha$ だけ回転させる。
このとき、
座標系 $C''$ も物体とともに回転させる。
回転後の新しい座標系を $C'''$ とする。
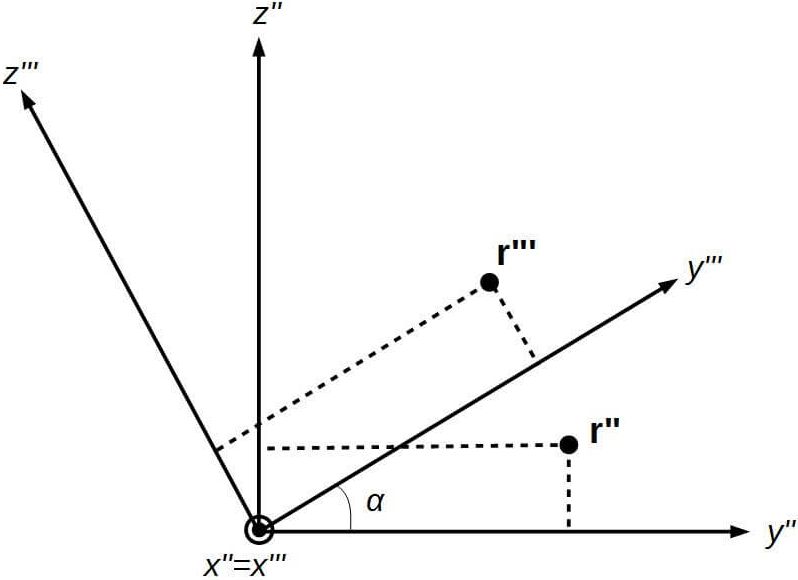
上の図は、
物体が $x''$ 軸まわりに角度 $\alpha$ だけ回転するときに、
座標系も物体に追随して $x''$ 軸まわりに角度 $\alpha$ だけ回転する様子を表したものである。
回転後の物体の位置を $\mathbf{r}'''$ とし、
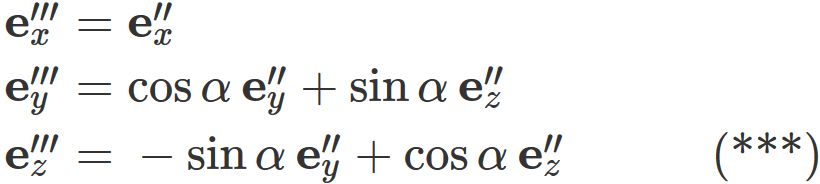
回転後の座標系 $C'''$ の正規直交基底を $\{ \mathbf{e}_{x}''', \mathbf{e}_{y}''', \mathbf{e}_{z}''' \}$ と表す。
回転前と回転後で物体と座標系との相対的位置関係が変わらないことから、
$\mathbf{r}'''$ の位置を $C'''$ によって表すと、$\mathbf{r}$ と(または $\mathbf{r}'$ や $\mathbf{r}''$ と) 同じ座標値を持つ。
すなわち、$\mathbf{r}'''$ は

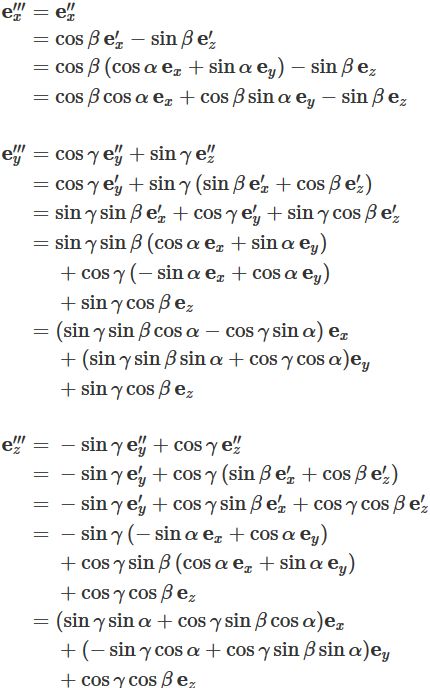
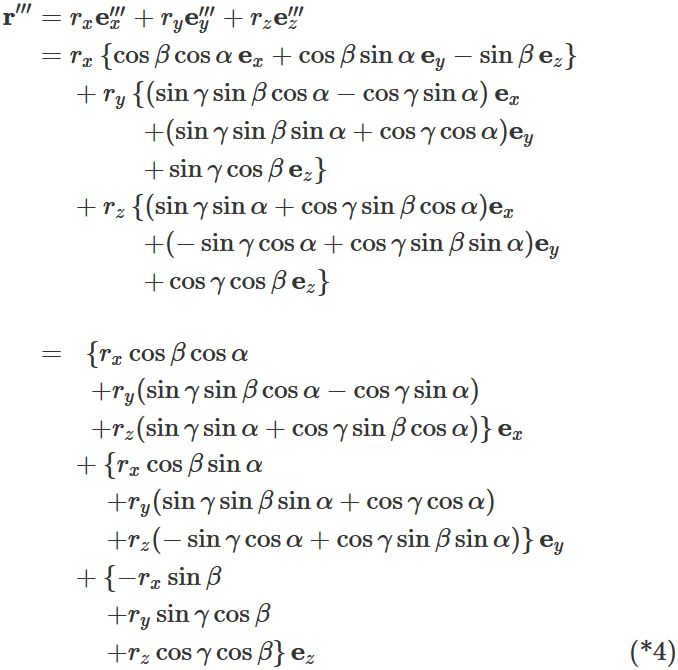
ここで3つの回転後の物体の位置 $\mathbf{r}'''$ を

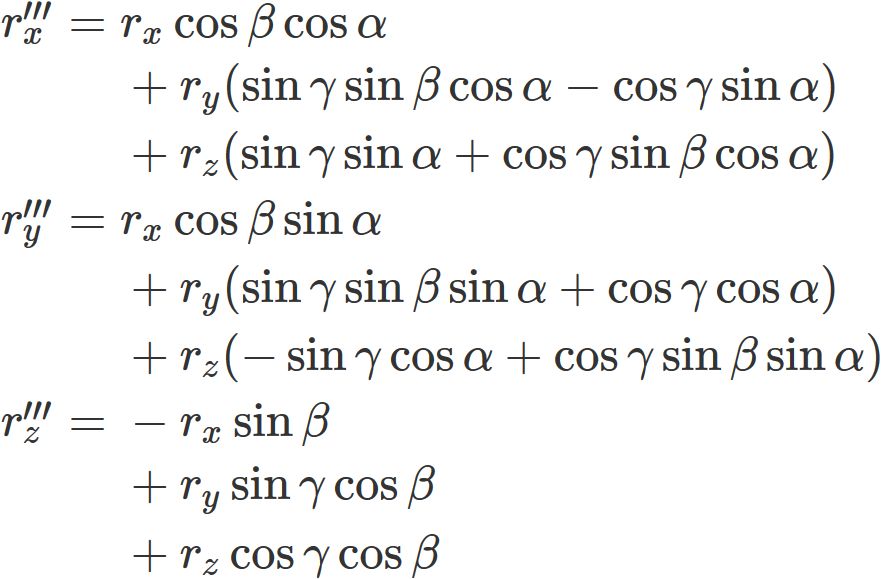

$ r_{x}''',r_{y}''',r_{z}''' $ は、3 つの回転後の物体の位置であり、 一方、 $ r_{x},r_{y},r_{z} $ は物体の初期位置を座標値である。 従って、上の変換式は、 3 つの回転後の物体の位置が初期位置に対して回転行列

3つの回転角 $\alpha,\beta,\gamma$ は、ロールピッチヨー角と総称される。