座標変換の公式と具体例 ~ 証明付 ~
座標変換 (2次元)
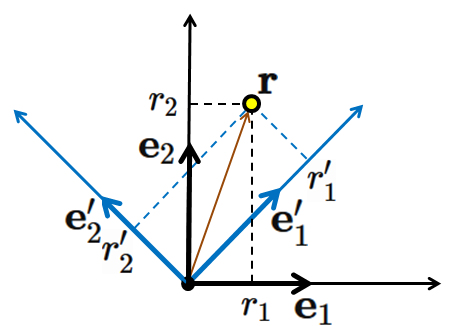
二次元ベクトル空間の座標軸 (基底) の一つを
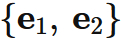

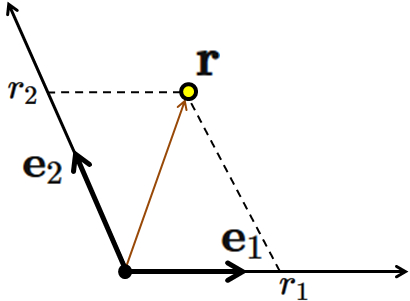

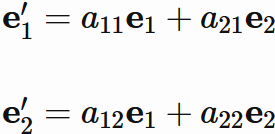
このとき、 係数 $\{ r'_{1}, r'_{2} \}$ と 係数 $\{r_{1},r_{2} \}$ の間には
以下で証明を与える。
証明
$(1.5)$ を $(1.4)$ に代入すると、
 となる。
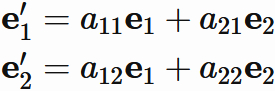
これと $(1.2)$ を比較すると、
線形独立なベクトルの線形結合の係数は唯一つであることから、
となる。
これと $(1.2)$ を比較すると、
線形独立なベクトルの線形結合の係数は唯一つであることから、
 が成り立つ。ここで、
行列 $A$ を
が成り立つ。ここで、
行列 $A$ を
 とすると、
とすると、
 と表せる。後で補足2で証明するように、
行列 $A$ には逆行列 $A^{-1}$ が存在する。
したがって、上の式の両辺に $A^{-1}$ を掛けることにより、
と表せる。後で補足2で証明するように、
行列 $A$ には逆行列 $A^{-1}$ が存在する。
したがって、上の式の両辺に $A^{-1}$ を掛けることにより、
 が成り立つことが分かる。
$A^{-1}$ の成分を具体的に表すと、
が成り立つことが分かる。
$A^{-1}$ の成分を具体的に表すと、
 である
(「2 x 2 の逆行列」を参考) ので、
が成り立つ。
である
(「2 x 2 の逆行列」を参考) ので、
が成り立つ。
 が成り立つ。
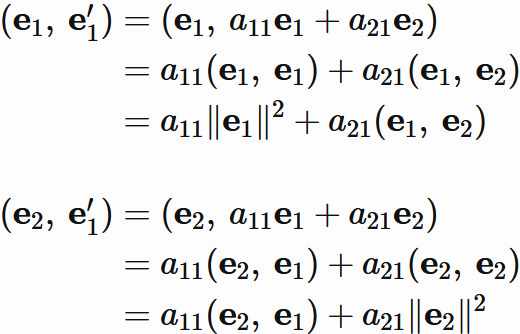
ここで $(\cdot, \cdot)$ は内積を表す記号であり、
$\| \cdot \|$
はノルムを表す記号である。
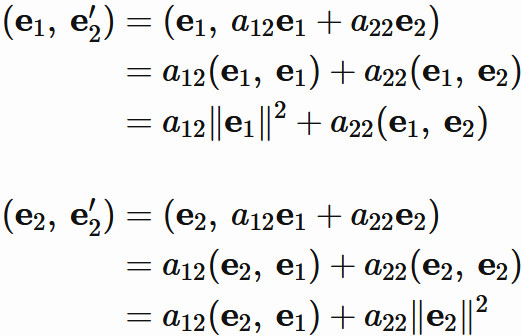
また、
両式の二つ目の等号では内積の線形性を用いた。
これらの二式は変数が $a_{11}$,
$a_{21}$ の連立一次方程式である。これを解くことにより、
$a_{11}$ と $a_{21}$ が
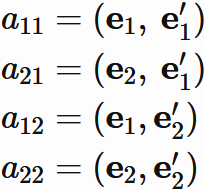
が成り立つ。
ここで $(\cdot, \cdot)$ は内積を表す記号であり、
$\| \cdot \|$
はノルムを表す記号である。
また、
両式の二つ目の等号では内積の線形性を用いた。
これらの二式は変数が $a_{11}$,
$a_{21}$ の連立一次方程式である。これを解くことにより、
$a_{11}$ と $a_{21}$ が
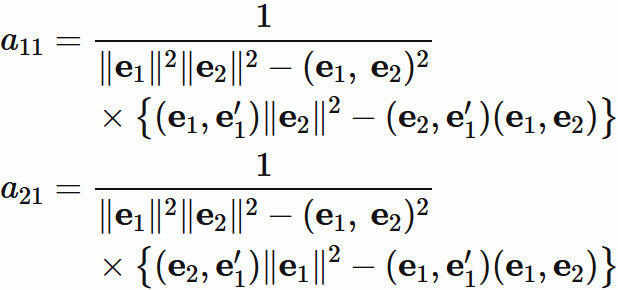 $$
\tag{1.6}
$$
と求まる。同じように、
$(1.5)$ の第二式より、
$$
\tag{1.6}
$$
と求まる。同じように、
$(1.5)$ の第二式より、
 が成り立つ。これを解くことにより、
が成り立つ。これを解くことにより、
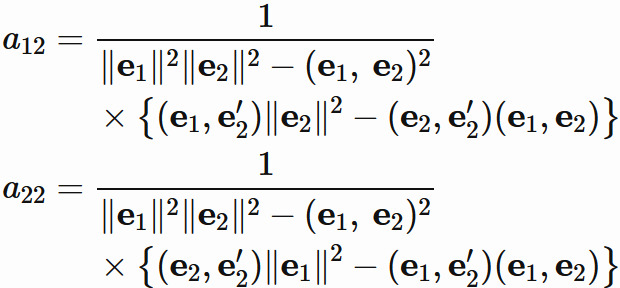 $$
\tag{1.7}
$$
と求まる。
このように $(1.5)$ の係数 は座標軸の内積から求められる。
$$
\tag{1.7}
$$
と求まる。
このように $(1.5)$ の係数 は座標軸の内積から求められる。
 $$
\tag{1.8}
$$
が成り立つと仮定すると、必ず
$$
\tag{1.8}
$$
が成り立つと仮定すると、必ず
 $$
\tag{1.9}
$$
である。
一方、
$(1.8)$ は $(1.5)$ を用いると、
$$
\tag{1.9}
$$
である。
一方、
$(1.8)$ は $(1.5)$ を用いると、
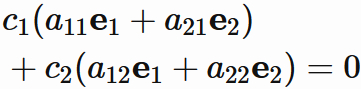 と表され、整理すると、
と表され、整理すると、
 である。
$(1.1)$ もまた座標軸 (基底) であるため、
線形独立であるので、
上の式の各係数は $0$ である。すなわち、
である。
$(1.1)$ もまた座標軸 (基底) であるため、
線形独立であるので、
上の式の各係数は $0$ である。すなわち、
 が成り立つ。これは $A$ を用いて、
が成り立つ。これは $A$ を用いて、
 $$
\tag{1.10}
$$
と表される。
$$
\tag{1.10}
$$
と表される。
このように $(1.10)$ と $(1.8)$ と同値である。 したがって、$(1.10)$ ならば $(1.9)$ が成り立つ。 これは、(同次) 連立一次方程式 $(1.10)$ が自明な解 $(1.9)$ のみを持つことを表している。 自明な解のみを持つ同次連立一次方程式の係数行列は逆行列を持つので、 $A$ には逆行列が存在する。
$(1.5)$ を $(1.4)$ に代入すると、
補足1:
$(1.5)$ の係数を求める。
$(1.5)$ の第一式より、
補足2:
$(1.3)$ は座標軸 (基底) であるので、
線形独立である。
従って、
このように $(1.10)$ と $(1.8)$ と同値である。 したがって、$(1.10)$ ならば $(1.9)$ が成り立つ。 これは、(同次) 連立一次方程式 $(1.10)$ が自明な解 $(1.9)$ のみを持つことを表している。 自明な解のみを持つ同次連立一次方程式の係数行列は逆行列を持つので、 $A$ には逆行列が存在する。
正規直交基底の座標変換 (2次元)
基底
$(1.1)$
が正規直交基底を成す場合、
すなわち、
解説
$(1.5)$ 式と同様に、 基底 $(1.1)$ と 別の基底 $(1.3)$ の関係を
 と表すとき、
$(1.6)$
と
$(1.7)$に対して
$(2.1)$
を適用すると、
と表すとき、
$(1.6)$
と
$(1.7)$に対して
$(2.1)$
を適用すると、
 を得る。
したがって基底間の関係 $(1.5)$ は
を得る。
したがって基底間の関係 $(1.5)$ は
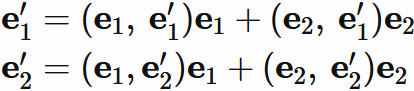 と表される。
このように正規直交基底からの座標変換は $a_{ji}$ が内積から得られるので、
比較的計算量が少なくて済む。
また、
と表される。
このように正規直交基底からの座標変換は $a_{ji}$ が内積から得られるので、
比較的計算量が少なくて済む。
また、
 $$
\tag{2.2}
$$
と定義すると、
$$
\tag{2.2}
$$
と定義すると、
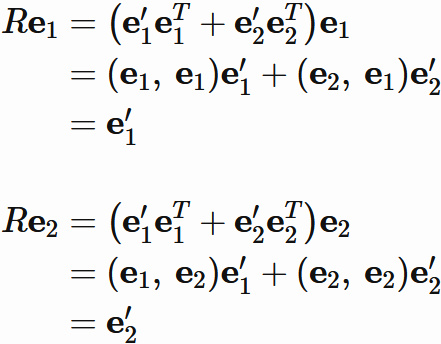 が成り立つ。
したがって、$R$ は正規直交基底
$(1.1)$ を基底 $(1.2)$ に変換する基底変換行列である。
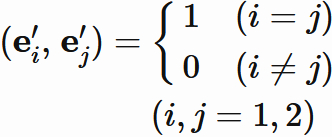
とくに、$(1.2)$ もまた正規直交基底である場合には、
すなわち、
が成り立つ。
したがって、$R$ は正規直交基底
$(1.1)$ を基底 $(1.2)$ に変換する基底変換行列である。
とくに、$(1.2)$ もまた正規直交基底である場合には、
すなわち、
 $$
\tag{2.3}
$$
が成り立つ場合には、
$R$ が直交行列になる。
すなわち、
$$
\tag{2.3}
$$
が成り立つ場合には、
$R$ が直交行列になる。
すなわち、
 が成り立つ。ここで
$I$ は単位行列である。
この関係を導出するためには、
$(2.1)$
$(2.2)$
$(2.3)$
および、
単位行列の性質
や
直交行列の性質
を用いるとよい (導出を省略)。
が成り立つ。ここで
$I$ は単位行列である。
この関係を導出するためには、
$(2.1)$
$(2.2)$
$(2.3)$
および、
単位行列の性質
や
直交行列の性質
を用いるとよい (導出を省略)。
 を別の正規直交基底
を別の正規直交基底
 に変換する基底変換行列は、
$(2.2)$ より、
に変換する基底変換行列は、
$(2.2)$ より、
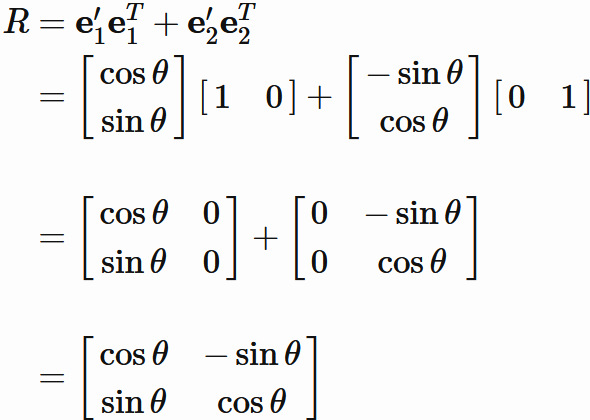 である。
これは 角度 $\theta$ だけ座標軸を回転させる行列である。
である。
これは 角度 $\theta$ だけ座標軸を回転させる行列である。
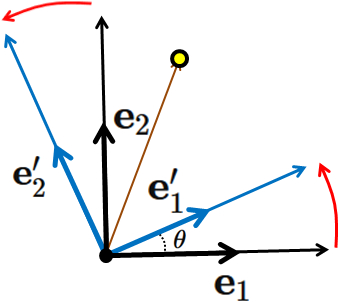 この行列は、
物体を $-\theta$ だけ回転させる回転行列でもある。
このように、$(2.2)$ 式から物体の回転行列を得ることもできる。
この行列は、
物体を $-\theta$ だけ回転させる回転行列でもある。
このように、$(2.2)$ 式から物体の回転行列を得ることもできる。
$(1.5)$ 式と同様に、 基底 $(1.1)$ と 別の基底 $(1.3)$ の関係を
具体例
2次元実ベクトル空間の正規直交基底
座標変換 ($n$ 次元)
$n$ 次元ベクトル空間の座標軸 (基底) の一つを
同じように、 $(3.1)$ とは別の座標軸を
ところで、 $(3.1)$ が基底であることから、 $(3.3)$ を $(3.1)$ の線形結合によって、
以下では、 係数 $\{ r'_{1}, r'_{2} \}$ と 係数 $\{r_{1}, r_{2} \}$ の間の関係を表す方法を議論する。
解説
$(3.5)$ を $(3.4)$ に代入すると、
 となる。
これと $(3.2)$ を比較すると、
線形独立なベクトルの線形結合の係数は唯一つであることから、
となる。
これと $(3.2)$ を比較すると、
線形独立なベクトルの線形結合の係数は唯一つであることから、
 が成り立つ。ここで、
行列 $A$ を
が成り立つ。ここで、
行列 $A$ を
 とすると、
とすると、
 と表せる。後で補足3で証明するように、
行列 $A$ には逆行列
$A^{-1}$ が存在する。
したがって、上の式の両辺に $A^{-1}$ を掛けることにより、
と表せる。後で補足3で証明するように、
行列 $A$ には逆行列
$A^{-1}$ が存在する。
したがって、上の式の両辺に $A^{-1}$ を掛けることにより、
 が成り立つことが分かる。
この式は $\{ r'_{i} \}$ と $\{ r_{i} \}$ の関係を表す。以下の補足1では $A$ の求め方を議論する。
が成り立つことが分かる。
この式は $\{ r'_{i} \}$ と $\{ r_{i} \}$ の関係を表す。以下の補足1では $A$ の求め方を議論する。
 $$
\tag{3.6}
$$
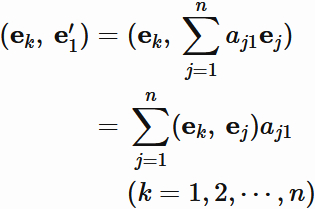
が成り立つ。
ここで $(\cdot, \cdot)$ は内積を表す記号であり、
$\| \cdot \|$
はノルムを表す記号である。
また、
二つ目の等号では内積の線形性を用いた。
$(3.6)$は $n$ 個の変数 $a_{j1}$ $\small (j=1,\cdots, n)$ に対する連立一次方程式である。
これらは、
次の行列
$$
\tag{3.6}
$$
が成り立つ。
ここで $(\cdot, \cdot)$ は内積を表す記号であり、
$\| \cdot \|$
はノルムを表す記号である。
また、
二つ目の等号では内積の線形性を用いた。
$(3.6)$は $n$ 個の変数 $a_{j1}$ $\small (j=1,\cdots, n)$ に対する連立一次方程式である。
これらは、
次の行列
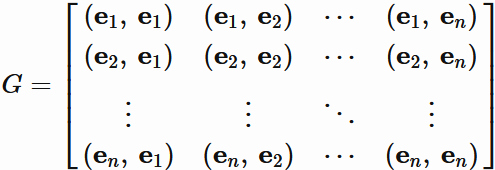 を用いると、
を用いると、
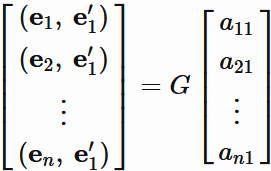 とまとめて表せる。$G$ をグラム行列という。
$(3.1)$ が線形独立であるので、
$G$ には逆行列が存在する (線形独立なベクトルから構成されるグラム行列の行列式は $0$ ではない。したがって、逆行列が存在する)。
これより、
とまとめて表せる。$G$ をグラム行列という。
$(3.1)$ が線形独立であるので、
$G$ には逆行列が存在する (線形独立なベクトルから構成されるグラム行列の行列式は $0$ ではない。したがって、逆行列が存在する)。
これより、
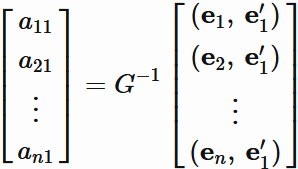 と $a_{j1}$ 求まる。
同じように $(3.6)$ の
$(\mathbf{e}_{k},\hspace{1mm} \mathbf{e}'_{1} )$
の代わりに
$(\mathbf{e}_{k},\hspace{1mm} \mathbf{e}'_{s} )$ を考えることによって、
$a_{js}$
$(s=1,2,\cdots,n)$ も求めることもできる。
このように行列 $A$ の各成分は座標軸の内積から求められる。
と $a_{j1}$ 求まる。
同じように $(3.6)$ の
$(\mathbf{e}_{k},\hspace{1mm} \mathbf{e}'_{1} )$
の代わりに
$(\mathbf{e}_{k},\hspace{1mm} \mathbf{e}'_{s} )$ を考えることによって、
$a_{js}$
$(s=1,2,\cdots,n)$ も求めることもできる。
このように行列 $A$ の各成分は座標軸の内積から求められる。
 が成り立つ場合、
$(3.5)$より、
が成り立つ場合、
$(3.5)$より、
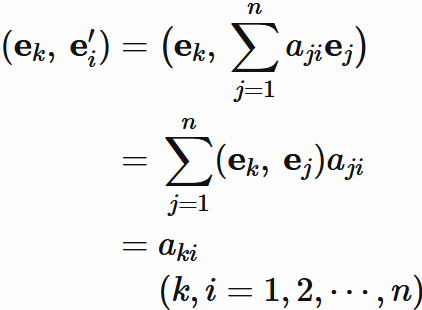 である。
したがって
である。
したがって
 と表される。
このように正規直交基底間の座標変換は $a_{ji}$ が内積から得られるので、
比較的計算量が少なくて済む。
と表される。
このように正規直交基底間の座標変換は $a_{ji}$ が内積から得られるので、
比較的計算量が少なくて済む。
 $$
\tag{3.7}
$$
が成り立つと仮定すると、必ず
$$
\tag{3.7}
$$
が成り立つと仮定すると、必ず
 $$
\tag{3.8}
$$
である。
一方、
$(3.7)$ は $(3.5)$ を用いると、
$$
\tag{3.8}
$$
である。
一方、
$(3.7)$ は $(3.5)$ を用いると、
 と表され、整理すると、
と表され、整理すると、
 である。
$(3.1)$ もまた座標軸 (基底) であるため、
線形独立であるので、
上の式の各係数は $0$ である。すなわち、
である。
$(3.1)$ もまた座標軸 (基底) であるため、
線形独立であるので、
上の式の各係数は $0$ である。すなわち、
 が成り立つ。
これは $A$ を用いて、
が成り立つ。
これは $A$ を用いて、
 $$
\tag{3.9}
$$
と表される。
$$
\tag{3.9}
$$
と表される。
このように $(3.9)$ と $(3.8)$ と同値である。 したがって、$(3.9)$ ならば $(3.8)$ が成り立つ。 これは、(同次) 連立一次方程式 $(3.9)$ が自明な解 $(3.8)$ のみを持つことを表している。 自明な解のみを持つ同次連立一次方程式の係数行列は逆行列を持つので、 $A$ には逆行列が存在する。
$(3.5)$ を $(3.4)$ に代入すると、
補足1:
行列 $A$ を求める。
$(3.5)$ より
補足2:
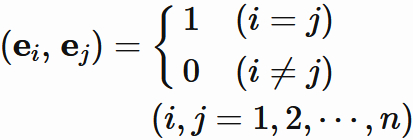
$\{ \mathbf{e}_{1}, \mathbf{e}_{2} \cdots \mathbf{e}_{n} \}$ が正規直交基底を成す場合、
すなわち、
補足3:
$(3.3)$ は座標軸 (基底) であるので、
線形独立である。
従って、
このように $(3.9)$ と $(3.8)$ と同値である。 したがって、$(3.9)$ ならば $(3.8)$ が成り立つ。 これは、(同次) 連立一次方程式 $(3.9)$ が自明な解 $(3.8)$ のみを持つことを表している。 自明な解のみを持つ同次連立一次方程式の係数行列は逆行列を持つので、 $A$ には逆行列が存在する。
例 (斜交座標 → 斜交座標)
座標軸が
解答例
座標系 $C$ と $C'$ の関係を表すために上の議論の $(1.6)$ 式と $(1.7)$ 式を用いる。 はじめに、
 と置く。これらの係数 $a_{ij}$ を求めるために次の計算を行う。
と置く。これらの係数 $a_{ij}$ を求めるために次の計算を行う。
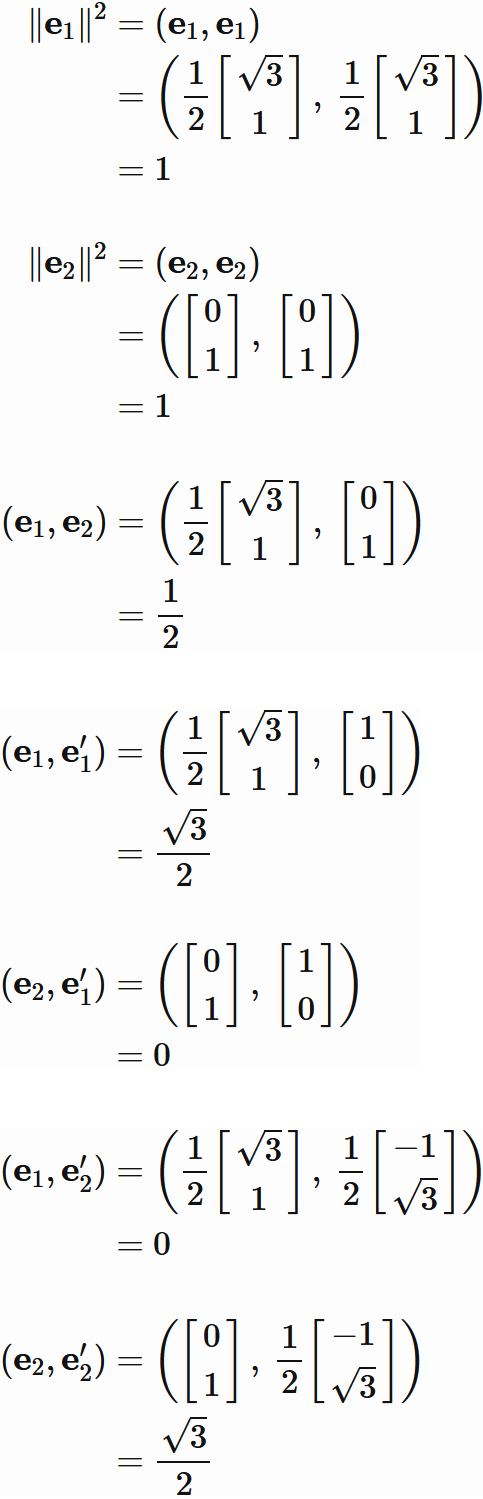 これらと
上の議論の
$(1.6)$ 式と $(1.7)$ 式より、$a_{ij}$ が
これらと
上の議論の
$(1.6)$ 式と $(1.7)$ 式より、$a_{ij}$ が
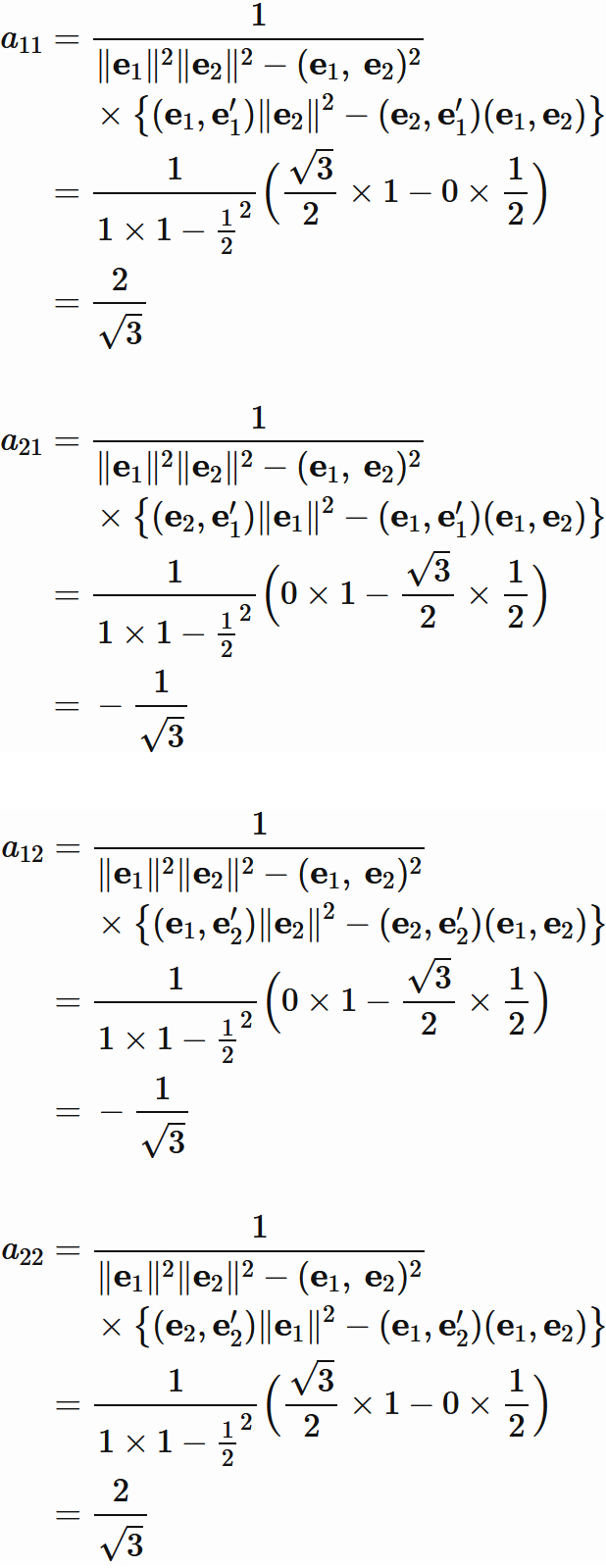 と求まる。したがって、
と求まる。したがって、
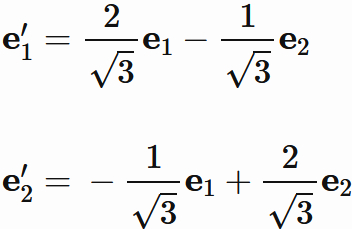 が成り立つ。
これが $C'$ の座標軸を $C$ の座標軸を用いて表した式である。
が成り立つ。
これが $C'$ の座標軸を $C$ の座標軸を用いて表した式である。
また、
 と表されるベクトル $\mathbf{r}$ を
と表されるベクトル $\mathbf{r}$ を
 と表したときの係数 $r'_{1}$ と $r'_{2}$ は、
座標変換の公式より、
と表したときの係数 $r'_{1}$ と $r'_{2}$ は、
座標変換の公式より、
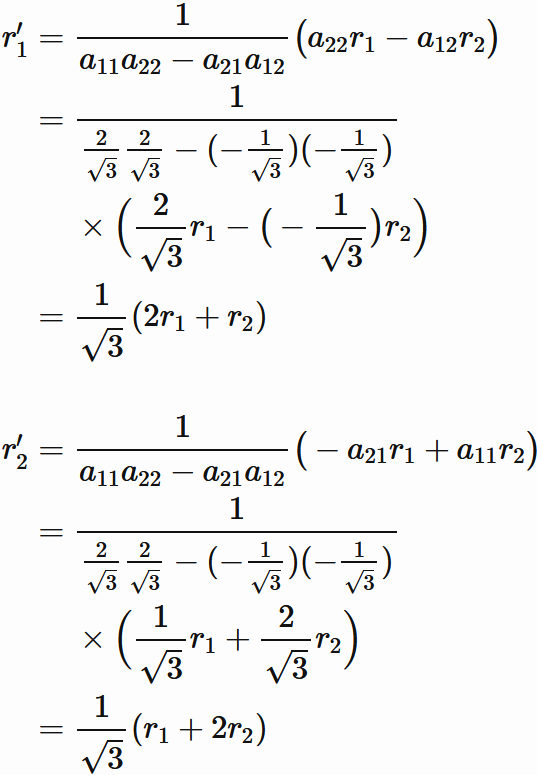 と求まる。
これらを用いると、
と求まる。
これらを用いると、
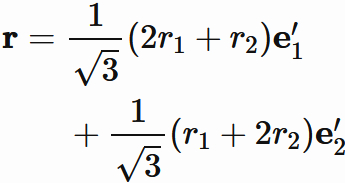 を得る。
これは $\mathbf{r}$ を座標系 $C'$ で表した式である。
を得る。
これは $\mathbf{r}$ を座標系 $C'$ で表した式である。
座標系 $C$ と $C'$ の関係を表すために上の議論の $(1.6)$ 式と $(1.7)$ 式を用いる。 はじめに、
また、
例 (正規直交基底 → 正規直交基底)
座標軸が

解答例
$(5.1)$ が基底を成すので、 任意のベクトルを線形結合で表すことが可能である。 そこで、 $(5.2)$ を $(5.1)$ の線形結合によって、
 と表す。
ここで $a_{ij} (i,j=1,2)$ は線形結合の係数である。
上の議論で示されているように、
この係数は
$(5.1)$ と $(5.2)$ が共に正規直交基底を成すことから、
と表す。
ここで $a_{ij} (i,j=1,2)$ は線形結合の係数である。
上の議論で示されているように、
この係数は
$(5.1)$ と $(5.2)$ が共に正規直交基底を成すことから、
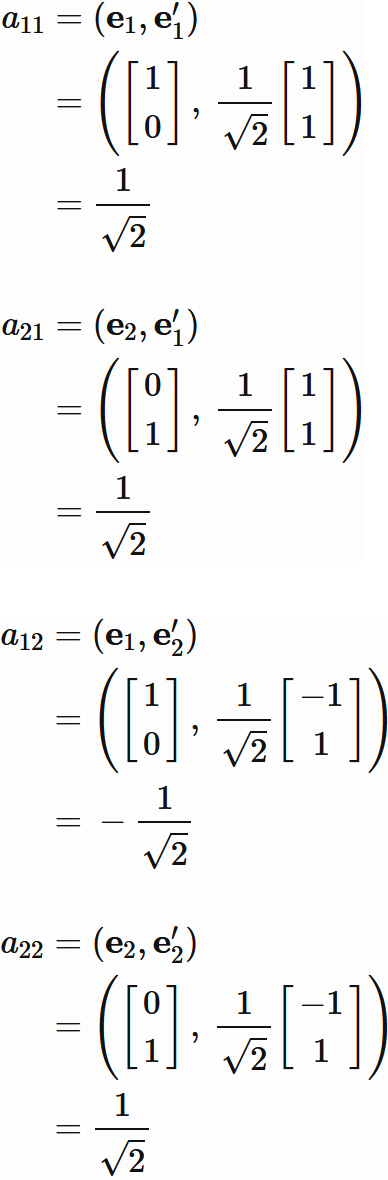 と求まる。したがって、
と求まる。したがって、
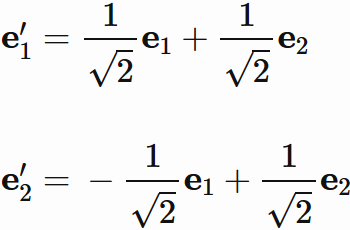 が成り立つ。
これが $C'$ の座標軸を $C$ の座標軸を用いて表した式である。
また、
が成り立つ。
これが $C'$ の座標軸を $C$ の座標軸を用いて表した式である。
また、
 と表されるベクトル $\mathbf{r}$ を
と表されるベクトル $\mathbf{r}$ を
 と表したときの係数 $r'_{1}$ と $r'_{2}$ は、
座標変換の公式より、
と表したときの係数 $r'_{1}$ と $r'_{2}$ は、
座標変換の公式より、
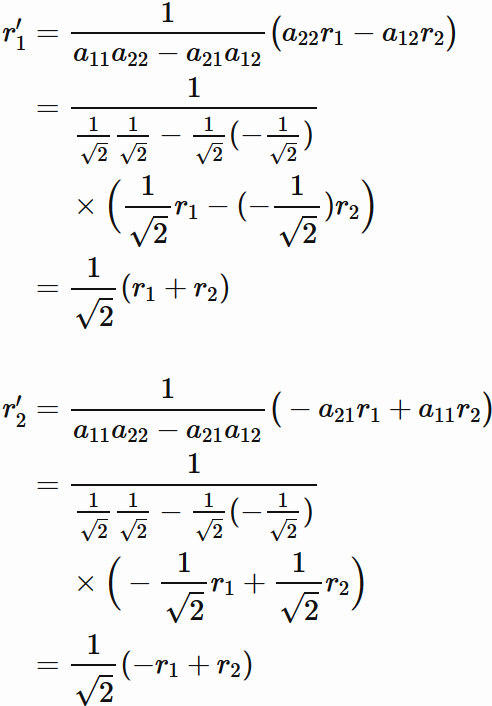 と求まる。
これらを用いると、
と求まる。
これらを用いると、
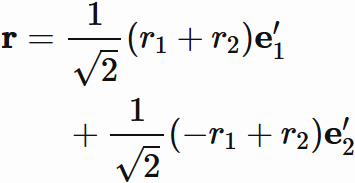 を得る。
これは $\mathbf{r}$ を座標系 $C'$ で表した式である。
を得る。
これは $\mathbf{r}$ を座標系 $C'$ で表した式である。
$(5.1)$ が基底を成すので、 任意のベクトルを線形結合で表すことが可能である。 そこで、 $(5.2)$ を $(5.1)$ の線形結合によって、